

てこ群背面に第1種機械連動装置が設けられています(画像左方)。てこの動きは、動作枠を動かし、連かん-クラ ンクを経て鎖錠軸を回転、鎖錠軸の回転は、駒付かんを左右方向にスライドさせる動きに伝わります。このとき、駒付かん上に取付けられた駒と、各駒付かん間 に設けられた縦駒との関係性=鎖錠により、てこが転換できるか、できないかが決まります。縦駒は、駒によって移動するか、駒をその位置に固定させるか、ということです。このように、あらかじめ各てこ相互間に駒配置によって関係性をもたせるもの、つまり、信号機と転てつ器等全てのてこ相互の鎖錠と解錠の連鎖を行う装置です。
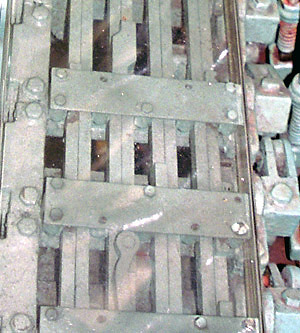
駒付かん(ロックバー)上に駒(ドック)が取付けられています。例では、撮影方向により駒付かんが縦方向、縦駒が横方向になっています。駒と連鎖関係にある縦駒(クロスバー)は、蓋により見えません。
これらの配置には、定位鎖錠・反位鎖錠・定反位鎖錠・条件付鎖錠などの方法があり、これらの組み合わせによって各停車場独自の配線や信号機に必要な連鎖条件を設定します。
最下に見える回転軸付きの駒は揺駒(スウィングドック)といわれ、条件付鎖錠に使用されます。
定位鎖錠


2.3のてこが定位の状態です。この状態では、どちらのてこも反位にできます。

3を反位にすると、駒付かん(ロックバー)が右に移動することによって、縦駒(クロスバー)を下に移動させます。この縦駒によって、2を反位にすることができない、定位鎖錠となります。
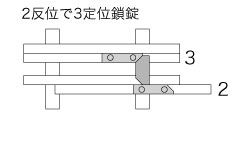
2を反位にすると、駒付かん(ロックバー)が右に移動することによって、縦駒(クロスバー)を上位置に固定、この縦駒によって、3を反位にすることができない、定位鎖錠となります。
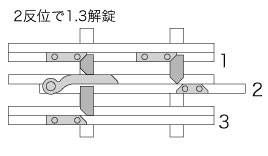
反位鎖錠
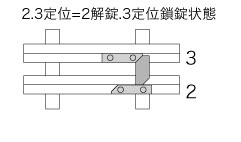
2.3とも定位で、2は反位にできる解錠状態です。3は反位にできない定位鎖錠状態です。

2を反位にすると、縦駒は自由になり、3は解錠状態、反位にすることができます。
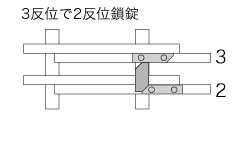
2を反位にし、3を反位にすると、縦駒は下がり2の駒を固定します。つまり、2は反位で鎖錠されます。
定反位鎖錠

2.3のてこが定位の状態です。この状態では、どちらのてこも反位にできます。

3を反位にすると、縦駒が下に下がり、2を定位に固定します。つまり2は定位に鎖錠されます。

2を反位にしてから3を反位にすると、2は縦駒により、反位に固定されます。つまり、反位に鎖錠されます。
条件付鎖錠

1.2.3が定位のとき、いずれのてこも反位にすることができる解錠状態です。
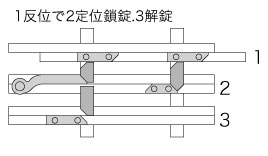
1を反位にすると、2の右側の駒に対して縦駒が固定され、2は定位鎖錠状態となりますが、3には影響はなく解錠状態のままです。
2を反位にすると、左の縦駒が上に移動しますが、1左側の駒は固定されず、1.3どちらも解錠状態のままです。

2を反位にしてから、1を反位にすると、左上の縦駒は下に移動し、2の揺駒を下に振らせ、左下の縦駒を下に移動させます。これによって、3は定位に鎖錠されることになります。また2は右上の縦駒により反位で鎖錠されます。